Un robot désherbeur lowtech avec ses accessoires (roues interchangeables, dock de chargement) et un logiciel libre
Robot lego

Léon est un agriculteur de Bourgogne Franche-Comté, la région de France où il pleut le plus. Contrairement à ce que l'on peut penser, la culture principale de cette région n'est pas le raisin, mais les cultures céréalières et oléagineuses.
Hier, Léon a utilisé son robot toute la journée pour s'occuper de son champ de blé. Il faisait beau, le sol était sec, il a donc choisi des roues en caoutchouc classique d'une vingtaine de centimètres d'épaisseur qui ont environ le diamètre d'une roue de voiture. Elles sont parfaitement adaptées à la terre sèche, elles n'abîment pas le champ et permettent d'aller plus vite sans s'enfoncer dans le sol.
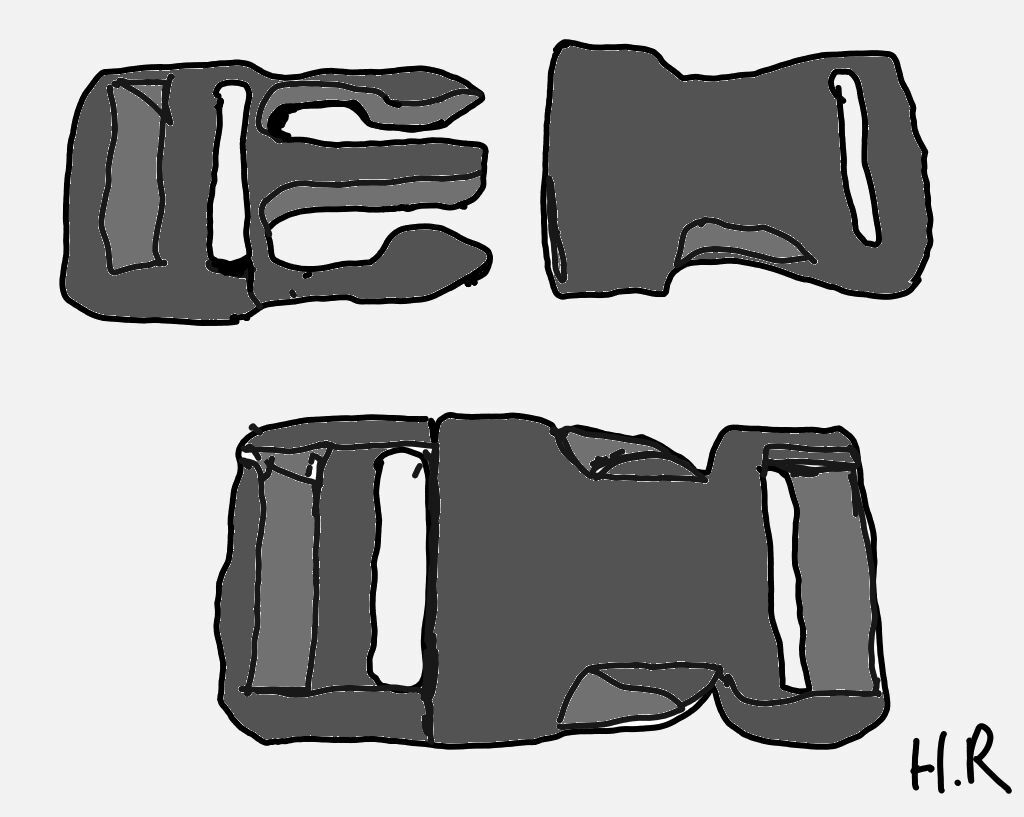
Malheureusement, aujourd'hui, il pleut énormément, le sol est très détrempé. Léon veut quand même utiliser son robot donc il récupère des chenilles en métal adaptées au robot. Léon débranche les roues et les enlève de la structure dans un espace dédié pour ranger les différents composants du robot. Il les remplace par les deux chenilles qu'il branche à la place et clipse sur la structure. Les clips fonctionnent sur le même principe qu'une boucle clip en plastique, mais en format un peu plus épais. Une partie malléable rentre dans une partie plus robuste et vient se clipser dans un espace vide à l'intérieur de la partie renforcée. Les roues non utilisées peuvent être rangées dans l'espace de rangement. Les chenilles permettent ainsi d'avancer dans une terre très trempée et empêchent le robot de glisser permettant ainsi à Léon de désherber son champ malgré ces conditions.
Pièces remplaçables
Julie a fait tomber son robot accidentellement, une des roues est endommagée, le support en métal qui tient la roue est plié et ne peut pas être réparé. Julie retire donc la partie roue du robot en la déclipsant. Elle retire ensuite le pneu et la jante encore en bon état du robot et le garde de côté. Aucun brevet n'a été déposé sur le système de roue du robot ainsi plusieurs fabricants peuvent fournir à Julie le support en métal pour qu'elle puisse le remplacer. Elle choisit celui qui lui convient sur internet en fonction du prix, de la disponibilité ou quelques critères qu’elle voudrait prendre en compte. Quand Julie recevra son nouveau support de roue, elle pourra remettre la jante puis le pneu dessus, de la même façon que l'on changeait une roue de vélo. Une fois cela terminé le support cassé ne sera qu'un lointain souvenir et le robot sera de nouveau complet.
Elle pourra renvoyer le support en métal cassé à l'entreprise qui fabrique le robot pour qu'il le recycle.
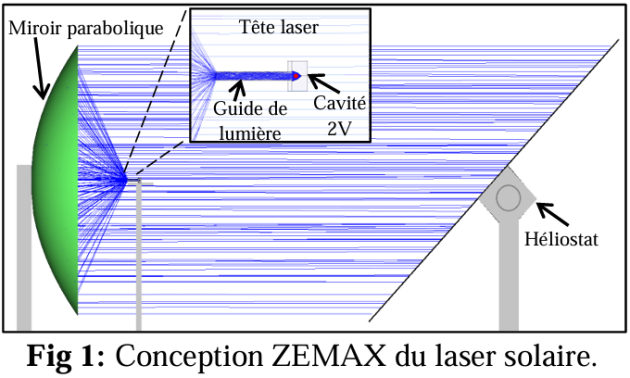
Laser solaire
Jacques a décidé d'utiliser le laser solaire plutôt que les bineuses aujourd'hui pour désherber son champ de salade. Il fait beau et cela permettra d'économiser les batteries du robot. Le laser solaire fonctionne grâce à un système de miroir qui amplifie la puissance de la lumière. Le robot en possède deux de chaque côté. Cela ne consomme aucune énergie autre que la lumière directe du soleil. Pour désactiver le laser, un clapet se referme avant les miroirs pour bloquer la lumière. Jacques doit veiller à l'entretien régulier des miroirs en les dépoussiérant régulièrement grâce à des petits pinceaux fournis avec le robot pour garantir leur fonctionnement. Le robot sait où se trouvent les salades grâce aux GPS où sont enregistrées les différentes rangées de plantes. Il passe ensuite les alentours au laser.
Système de désherbage
Loïc active son robot Agribots, aujourd’hui, il part désherber son champ de salade. La parcelle de salades a été ensemencée mécaniquement avec une distance entre les plants de 30 cm. Le robot est donc configuré de sorte à « regarder » entre cette espace. A l’aide d’une bineuse, le robot retourne donc la terre entre les différents sillons à une vitesse d’1km/h et s’occupe de 3 rangs en même temps.
Matériaux recyclés
Anne travaille dans une usine de recyclage qui traite les robots désherbeurs quand ceux-ci sont trop cassés pour être réparés, mais aussi les pièces individuelles du robot qui sont défectueuses ou cassées. Ce matin, elle travaille au tri des pièces métalliques. Les pièces métalliques sont assez simples à recycler. Une fois que tous les composants autres sont séparés des pièces métalliques, on compresse, on broie, on lamine et l'on fond toutes les pièces métalliques avant de les renvoyer à l'usine qui fabrique les robots sous forme de bars et de bobines de fil métallique selon les besoins pour fabriquer de nouvelles pièces de robot.
Durant l'après-midi, Anne passe au tri des batteries. C'est un procédé beaucoup plus compliqué, mais par chance, les robots ont des batteries éco-conçues. Ce sont des nouvelles batteries de type Li-ion, une toute récente innovation qui utilise des matériaux présents en plus grand nombre dans la nature et plus simples à recycler que les batteries actuelles (carbone, hydrogène, oxygène, azote, soufre). Elles ne sont pas trop petites pour permettre un démontage facilité et plus sécurisé et les procédés de synthèse sont faiblement énergivores. Contrairement aux batteries classiques, les cellules ne sont pas soudées entre elles pour permettre le démontage et la réparation. Aujourd'hui grâce à des techniques encadrées pour récupérer des matières souvent toxiques et dangereuses pour l'environnement. L'usine est capable de recycler 95% des batteries au bout d'un cycle de vie.
Changer les légumes en fonction des saisons
C'est la fin de l'été, Marc cultive des légumes d'été : courgette, tomate, épinard et des légumes d'hiver : des carottes, du chou, des endives. Durant la première moitié de l'année, Marc utilise son robot pour prendre soin de ses tomates qui sont très fragiles, mais en hiver une fois que les tomates ont été récoltées, Marc veut utiliser son robot pour ses carottes. Dans le robot est intégré une carte GPS de ses champs. Marc va donc récupérer son robot et va aller sur ses parcelles de carottes. Il va choisir dans sa liste de parcelle celle sur laquelle il va planter ses carottes puis indique l'écartement entre les différentes rangées. Le robot reconnaît les contours du terrain grâce à un fil périmétrique qui fait tout le tour du terrain qu'il a mémorisé quand Marc l'a acheté comme pour les robots tondeuses. Le fil se pose au abord du terrain par l’agriculteur. Celui-ci le maintient en place à l’aide de petite sardine en plastique d’algue qui se dégrade beaucoup plus rapidement que du plastique normal et ne pollue pas l’environnement. L’agriculteur vient ensuite faire le tour de son terrain avec le fil pour le délimiter. Il lance ensuite son robot pour la première fois. Celui-ci va demander tout de suite à son utilisateur s’il veut lancer un scan d’une nouvelle zone. Ensuite, le robot scan la zone en suivant le fil et va mémoriser le terrain et ses limites. Une fois cette petite tâche terminée, le robot est autonome et va désherber seul sans l'assistance de Marc. Le fil ne risque pas de s’envoler grâce aux petites sardines qui tiendront le fil le temps que celui finisse par s’enfoncer dans le sol.
Énergie bas-carbone
Marie a utilisé son robot toute la journée et celui-ci est complètement déchargé, malheureusement, il lui reste une petite parcelle de son champ de carottes à terminer pour finir sa journée. Heureusement aujourd'hui c'est un jour de grand vent, Marie branche une éolienne portative sur un connecteur adapté sur la partie supérieure de son robot. Pendant qu'elle finit de ranger ses affaires, le robot a eu le temps de se recharger suffisamment pour finir les dernières rangées de carottes. Elle a donc atteint ses objectifs de la journée et ne prendra ainsi pas de retard sur son planning.
Les semaines suivantes, il y a un soleil de plomb sur les champs de Marie. Quand elle n’utilise pas son robot, Marie le met en plein soleil et branche le petit panneau solaire à la place de l’éolienne sur la tête du robot. Quand elle l’utilise, elle laisse le panneau solaire accroché au toit du robot et met la batterie sur un mode plus lent pour utiliser à la fois l’énergie du soleil et un peu de la batterie du robot pour le faire fonctionner sur un mode plus économique.